«Повстання машин» в Японії: сучасність і перспективи
- Японія лідирує в розробці андроїдів
- Яке майбутнє двоногих роботів?
- Аварія на АЕС і зростання важливості роботів для робіт в надзвичайних ситуаціях
- У змаганнях роботів для надзвичайних ситуацій перемагає венчурна компанія Токійського університету
- Вигоди японсько-американського співробітництва
- Бум покупок в Америці - ознака пожвавлення ринку роботів
Робототехніка деякий час перебувала на задвірках технологічних розробок, але зараз вона знову входить в силу. У новій стратегії розвитку, прийнятої урядом в червні 2014 року, згадується промислова революція з використанням роботів, і до кінця року передбачено розробити конкретний план використання роботів на п'ять наступних років. У тому ж місяці компанія Softbank представила нового робота-андроїда « Pepper ». Початок продажів запланований на лютий 2015 року, його ціна становитиме 190 тисяч ієн, і така дешевизна сколихнула ділові кола.
Японія лідирує в розробці андроїдів
 Симідзу Масахару народився в 1974 році. З тих пір, як він вступив на навчання до аспірантури Університету Аояма Гакуін, в лабораторію професора Томіями Кена, де проводять дослідження, пов'язані з робототехнікою, він став займатися системною архітектурою роботів. Попрацювавши в Агентстві науки і технології Японії, влаштувався на роботу в Технологічний інститут Тіба, в Центр досліджень технології роботів майбутнього (fuRo). (Фотографія Ямади Шінджі)
Симідзу Масахару народився в 1974 році. З тих пір, як він вступив на навчання до аспірантури Університету Аояма Гакуін, в лабораторію професора Томіями Кена, де проводять дослідження, пов'язані з робототехнікою, він став займатися системною архітектурою роботів. Попрацювавши в Агентстві науки і технології Японії, влаштувався на роботу в Технологічний інститут Тіба, в Центр досліджень технології роботів майбутнього (fuRo). (Фотографія Ямади Шінджі)
«Японія випереджає інші країни світу в розробці прямоходящих роботів-андроїдів. Дуже велику роль в цьому, безсумнівно, зіграла анімація. Безліч вчених, що розробляють роботів, надихалася мультфільмами - Могутній Атом, Дораемон », - каже Симідзу Масахару, провідний дослідник Центру робототехніки ( fuRo, Future Robotics Technology Center ) Технологічного інституту Тіба, - «Я, наприклад, отримав вчений ступінь доктора наук в області системної архітектури андроїдів; я з покоління, яке задивлялися аніме «Mobile Suit Gundam», - і він в якійсь мірі на нас вплинув ».
У розробках андроїдів робот «ASIMO» компанії Honda став важливим рубежем. Honda почала розробки андроїдів в 1986 році. Тоді ще прямоходящие роботи були в дивину, і вважалося, що технологічно здійснити прямоходіння дуже складно. «ASIMO» представили в 2000 році, а в середині 1990-х показували прототипи «P2», «P3» та інші; тоді вони викликали серед розробників бум прямоходящих роботів. Які ж на сьогоднішній день успіхи в створенні технології прямоходящих роботів?
«Спочатку було складно створити технологію прямоходіння, а зараз ці зусилля приносять свої результати: роботи вже бігають. Але це все-таки поки на експериментальному рівні, на рівні презентацій, а до виробництва роботів, практично застосовуваних в реальних умовах, яких можна було б використовувати як інструмент, - до такого технологічного рівня ми поки не дійшли ».
Яке майбутнє двоногих роботів?
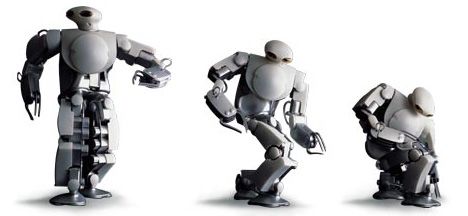 «Morph3» - робот, розроблений спільно симбіотичних системами Кітано ERATO при Агентстві науки і технології Японії і промисловим дизайнером Яманака Сюндзі. З 1 червня 2003 року група розробників «morph3» перейшла в Центр досліджень технології роботів майбутнього (fuRo) при Технологічному інституті Тіба, де і продовжує розробки. © fuRo
«Morph3» - робот, розроблений спільно симбіотичних системами Кітано ERATO при Агентстві науки і технології Японії і промисловим дизайнером Яманака Сюндзі. З 1 червня 2003 року група розробників «morph3» перейшла в Центр досліджень технології роботів майбутнього (fuRo) при Технологічному інституті Тіба, де і продовжує розробки. © fuRo
Концепція робота «morph3» (див. відео ), Над створенням якого в числі інших працював і Симідзу Масахару, - «металевий атлет», тобто невеликий і легкий робот, що володіє дуже рухливими суглобами і здатний здійснювати найрізноманітніші руху. Технології, випробувані в цьому невеликому роботові, який має прекрасні характеристиками пристрою тіла, в майбутньому можуть бути використані в розробці рухомих матеріальних інтерфейсів для віддаленої комунікації.
«Наприклад, уявіть собі, що при рукостисканні сила, з якою ви потискуєте один одному руки, передається вам за допомогою мініатюрних роботів-андроїдів. Передача візуальної та звукової інформації можлива за допомогою комп'ютерів і мобільних телефонів через Інтернет, але для передачі відчутних відчуттів, сили, необхідні робототехнологіі », - каже Симідзу Масахару.
Новий двоногий робот «core» (див. відео ), Який зараз розробляється в Технологічному інституті Тіба, служить для транспортування. Це один з найпотужніших роботів такого типу в світі, його вантажопідйомність становить близько 100 кг. Симідзу Масахару так описує його: «Це - базова розробка нового транспортного засобу, за допомогою якого люди, які відчувають труднощі при ходьбі або нездатні самостійно пересуватися, або ж просто не володіють достатньою силою, могли б переміщатися по сходах, підніматися по гірських схилах .. . У чому сенс розробок роботів-андроїдів? Їх часто порівнюють з гоночними автомобілями «Формула 1». Вони втілюють продовження ідеї автомобіля, але машина з такими даними не може їздити по звичайних дорогах, зате в них використовуються самі передові технології, і різні аспекти цих технологій знаходять практичне застосування в повсякденності ».
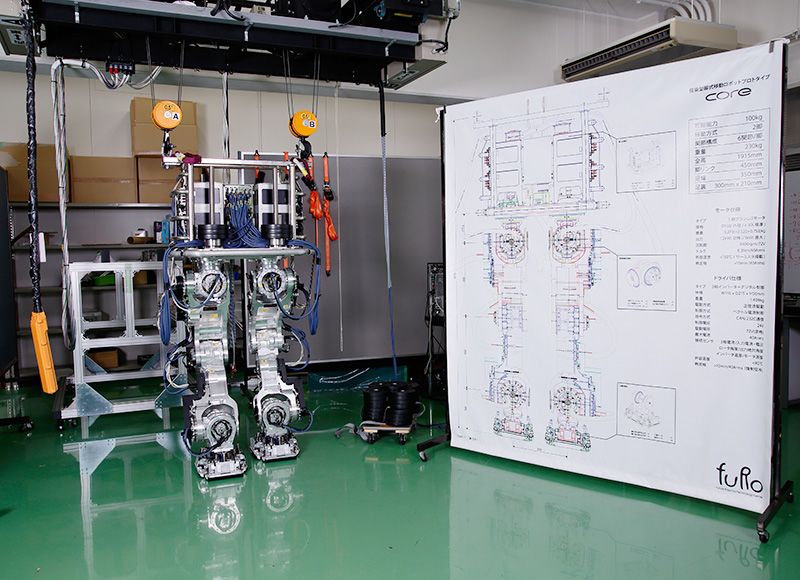 Двоногий робот «core» буде здатний возити людей і переносити вантажі в 100 кг (Фотографія: Ямада Шінджі)
Двоногий робот «core» буде здатний возити людей і переносити вантажі в 100 кг (Фотографія: Ямада Шінджі)
Аварія на АЕС і зростання важливості роботів для робіт в надзвичайних ситуаціях
На відміну від андроїдів, роботи для особливих робіт у надзвичайних ситуаціях більш спеціалізовані. Після аварії на АЕС «Фукусіма-1», що сталася слідом за землетрусом і цунамі 11 березня 2011 року, була високо оцінена важливість таких роботів.
Першим з японських роботів, що використовувалися на цій АЕС, був розроблений в Технологічному інституті Тіба робот для АЕС «Quince» , Але раніше за нього в будівлі реактора працював американський «PackBot».
«У той час багато говорили про те, що Японія - передова в робототехніці країна, і все одно чогось використовували американського робота; можна було використовувати «ASIMO» і т. п. Насправді андроїди були ще на демонстраційному, рекламному рівні, вони показували застосовуються технології », - згадує Симідзу Масахару.
Він каже: «PackBot» - це спочатку гусеничний робот-розвідник. Хоча він може відстежувати радіацію, зате по здатності рухатися через завали, по крутих і вузьких сходах, він поступався нашому «Quince». При розробці нашого робота ми розраховували, що він буде пробиратися через уламки, як після землетрусу 1995 року Кобе, і вести пошук. Він не був підготовлений до роботи на АЕС, тому ми витратили близько трьох місяців, щоб переобладнати, забезпечити захист від радіації, внести інші удосконалення, і тоді вже відправили на АЕС. Він виліз до п'ятого поверху будівлі та знімав відеокамерою обстановку ... На жаль, у першого «Quince», якому вдалося провести зйомку на п'ятому поверсі, на зворотному шляху на 3 поверсі заплуталися дроти, і він не зміг продовжувати рух. Після удосконалень туди відправили 2-й і 3-й «Quince», вони проводили зйомки на п'ятому поверсі і благополучно поверталися, вони використовуються на обстеженні станції і зараз ».
В якості наступника «Quince» Технологічний інститут Тіба створив роботів «Sakura 1» і «Sakura 2», які з самого початку розроблялися спеціально для робіт на АЕС. «Sakura 1» значно менше «Quince» за розмірами, за рахунок чого може проходити у вузьких місцях. «Sakura 2» може бути обладнана двометровим маніпулятором з камерою, зробленою так, щоб робот міг підняти його і знімати там, куди не може піднятися сам, або ж просовувати в вузькі проміжки.
У змаганнях роботів для надзвичайних ситуацій перемагає венчурна компанія Токійського університету
Так в Японії працювали над удосконаленням роботів для надзвичайних ситуацій, виходячи з реальних завдань, поставлених стихійним лихом 11 березня 2014 року. Тим часом в США зосередили зусилля на розробці багатофункціональних роботів-андроїдів, здатних працювати в надзвичайних ситуаціях. В кінці 2013 р Агентство з перспективних оборонних науково-дослідних розробок США (DARPA) організувало змагання роботів DRC (DARPA Robotics Challenge), метою яких було стимулювати розробки роботів, які могли б працювати в надзвичайних ситуаціях, особливо під час аварій на АЕС. Було потрібно виконати вісім завдань, серед яких було водіння автомобіля. Це замислювалося явно в розрахунку на роботів, схожих за формою з людиною. Симідзу Масахару скористався цією нагодою спостерігати змагання роботів, які втілили в собі передові технології.
«Переможцем став робот, створений венчурною компанією Токійського університету« SCHAFT ». У цього робота дві ноги і дві руки; на відміну від людини, у нього немає передньої і задньої сторони, він зроблений гнучким, щоб проводити роботи в зоні лиха. Тільки одне із завдань, прохід через завали, у нього зайняло значно більше часу, ніж у гусеничних моделей ... Загальні результати показують, що, за винятком команди, яка керувала людиноподібним роботом « ATLAS »Від DARPA, вищі нагороди отримали команди з іншими типами роботів - мавпоподібних, тобто пересуваються на чотирьох кінцівках, з моделями, в яких використані гусениці, закріплені на кінцівках. Стало очевидно, що у людиноподібних роботів ще багато аспектів, які потрібно доопрацювати. І все ж, дивлячись на «SCHAFT», я відчував, наскільки високі японські технології людиноподібних роботів. Тільки ось в листопаді 2013 року цю компанію викупив Google ... ».
 Робот «SCHAFT» водить автомобіль © DARPA
Робот «SCHAFT» водить автомобіль © DARPA
Вигоди японсько-американського співробітництва
Японія і США мають схожий розумінням необхідності розробок роботів для надзвичайних ситуацій та втілення їх в життя. Японія теж включилася в гонку створення роботів, які можуть брати участь в DRC. Симідзу Масахару каже: «Я думаю, що в США високо оцінюють японські технології людиноподібних роботів і хочуть використовувати напрацювання, створені в Японії».
Якщо для США вигода від співпраці в можливості використовувати японські технології, то які ж блага отримує Японія? «Дуже велике значення має те, що ми можемо проводити тести продуктивності, виконуючи різні завдання в ході масштабних презентацій, таких, як DRC, для якої повністю орендують автотрек. Після таких презентацій розробки роботів активізуються. За запитом міністерства економіки, торгівлі і промисловості об'єднана команда Технологічного інституту Тіба, Токійського університету, Осакського університету і Університету Кобе працює над створенням людиноподібного робота з двома ногами і руками, з яким виступить на DRC в червні 2015 року. У ньому ми зможемо повною мірою показати переваги тих ноу-хау, які були створені при розробці «Sakura 1» і «Sakura 2» для роботи в надзвичайних ситуаціях ».
Бум покупок в Америці - ознака пожвавлення ринку роботів
Починаючи з компанії Google, викуповувати венчурні компанії з розробки роботів, включаючи вищезгадану SCHAFT, все активніше американські лідери IT і сильні венчурні інвестори вкладають гроші в робототехніку. За словами Симідзу Масахару, в Америці зараз справжній бум робототехніки.
«Американські підприємці, ймовірно, вважають, що робототехніка потребує невеликому поштовху, щоб почати приносити відчутні результати. З іншого ж боку, в Японії як державні організації, так і приватні підприємства досі інвестували в надії на перспективу. Оскільки це були вкладення в розрахунку на майбутнє, а поки що, не дивлячись на вкладення, роботи ще не дійшли до стадії практичного застосування і використання в промисловості, то з подальшими достатніми для розробок інвестиціями вже не поспішали », - розповідає Симідзу Масахару.
Поступово настає усвідомлення того, що робототехніка може з успіхом застосовуватися в якихось сферах повсякденного життя і бути затребувана на ринку. Робот «Roomba», випущений американською компанією iRobot в 2002 році, став хітом продажів. Таких роботів нарешті недавно стали випускати Toshiba, Sharp і інші виробники.
 Сон Масаесі, глава корпорації Softbank (праворуч) і Бруно Мезон, директор дочірньої компанії Aldebaran Robotics, на презентації робота «Pepper», здатного визначати емоції і реагувати на них (5 червня 2014 р .; фото Jiji Press)
Сон Масаесі, глава корпорації Softbank (праворуч) і Бруно Мезон, директор дочірньої компанії Aldebaran Robotics, на презентації робота «Pepper», здатного визначати емоції і реагувати на них (5 червня 2014 р .; фото Jiji Press)
Симідзу Масахару каже, що дії Сон Масаесі, який купив в 2012 р французьку компанію Aldebaran Robotics і розробив робота «Pepper», само собою, оживили ринок і стали великим стимулом для японської робототехнической промисловості. «Вселяє надію те, що серед японських інвесторів і бізнесменів є люди, чуйно сприймають великі можливості, які приховує в собі робототехніка», - говорить він.
Симідзу Масахару сказав, що хоче зберегти те захоплення творчістю, яке він відчуває, коли створює щось нове. Він каже: «З приводу застою в галузі обслуговуючих роботів існує думка, що неможливо розрахувати необхідний бюджет - для цього потрібно визначити запити споживачів, об'єднати різні існуючі зараз технології, створити корисний продукт, а без цього не буде ринку такої продукції. Все так і є, але якщо виходити тільки з цього, новий продукт ніколи не з'явиться. Найкраще, на мій погляд, - це обдумати те, що мені самому здається цікавим, уявити це світу і зацікавити всіх своїми ідеями. Я знову згадую власну радість і захопленість в ті часи, коли я почав займатися розробкою роботів, і зараз мені здається, що нарешті-то з'являються умови, які збільшать цю захопленість ».
Стаття написана за матеріалами інтерв'ю, проведеного 19 серпня 2014 р співробітниками редакційного відділу nippon.com. Фотографія вгорі сторінки: Ямада Шінджі
(Оригінал статті опубліковано на японському мовою 26 вересня 2014 г.)
Які ж на сьогоднішній день успіхи в створенні технології прямоходящих роботів?Яке майбутнє двоногих роботів?
У чому сенс розробок роботів-андроїдів?
Якщо для США вигода від співпраці в можливості використовувати японські технології, то які ж блага отримує Японія?