Історія роботів Boston Dynamics
- BigDog ( «великий пес»)
- Cheetah ( «гепард»)
- Sand Flea ( «піщана блоха»)
- Spot ( «цятку» - собача кличка в англомовних країнах)
- Atlas ( «Атлант, Титан»)
- Handle ( «рукоять»)
- RHex
- ***
Минулого тижня компанія Boston Dynamics знову привернула до себе увагу багатьох новинних ресурсів по всьому світу.

На своєму каналі в YouTube з інтервалом в декілька днів «Бостон» опублікували два невеликих відеоролика: в першому з них собакоподобний робот SpotMini з легкістю і небаченою раніше упевненістю в рухах бігає по газону двору, а в другому людиноподібний робот Atlas виконує різноманітні стрибки, включаючи досить складний акробатичний трюк - сальто назад.
Сумарна кількість переглядів обох роликів наближається до цифри 15 млн, а гімнастичні вправи «Атласу» за добу переглянули понад 6 млн осіб. Робототехніка та передові технології аж ніяк небезінтересні читачам Overclockers.ua, тому в нашій сьогоднішній статті ми постараємося розповісти вам цікаву історію людей і роботів Boston Dynamics.
Boston Dynamics була створена професором Марком Райбертом в 1992 році. До цього Марк був відомий як засновник і провідний науковий співробітник Leg Lab ( «лабораторія ніг» - в пров. З англ.) Массачусетського технологічного інституту. Співробітники лабораторії займалися дослідженням і створенням динамічних машин і механізмів, що пересуваються за допомогою згинаються або обертових на шарнірі опорних конструкцій ( «ніг»).
У 80-х роках минулого століття Марк і його команда розробили цілий ряд «стрибунів», «Ходунов» і «бігунів» і тим самим заклали фундаментальні основи проектування шагоходи, а книга Райберта по темі балансують машин « Legged Robots That Balance »Вважається класичною в середовищі профільних інженерів і вчених.
Інтерес до робототехніці виник у Марка в студентські роки і в підсумку він присвятив цій темі все життя. У кандидатській дисертації під назвою «Motor control and learning by the state space model» (1977 рік) він розглядав можливість використання роботів для моделювання поведінки біологічних організмів. Зараз пану Райберту вже 68 років, проте, він залишається президентом компанії і бере активну участь у всіх проектах. Незважаючи на статус президента, Марк віддає перевагу гавайські сорочки піджаків і краваток і є веселим і товариською людиною.

Райберт описує команду Boston Dynamics як «просто інженерів, які будують роботів», але насправді досягнення «Бостона» важко недооцінити. Кожне їхнє творіння використовує самі передові технології з різноманітних сфер: електрики, механіки, комп'ютерних технологій, композитних матеріалів і так далі. Фінансування більшості проектів Boston Dynamics отримує з військових джерел, включаючи Агентство перспективних дослідницьких проектів Міноборони США (Defense Advanced Research Projects Agency - DARPA), а також представників сухопутних військ, флоту і корпусу морської піхоти. Одного разу Google, яка володіла Boston Dynamics з 2013 по 2017 рік, обмовилася про виконання зобов'язань за контрактом з DARPA вартістю 11 млн доларів США.
Примітно, що співпраця з Google не склалося з самого початку. Корпорація купила Boston Dynamics разом з дев'ятьма іншими роботехнічних компаніями в 2013 році, але не знала, що з ними робити. «З часом все ми відчули стіну нерозуміння між нами і ними - ми не були частиною Google, ми були якимось окремим об'єктом», - розповів один зі співробітників Boston Dynamics. Таким чином, в червні 2017 японська телекомунікаційна медіакорпорація SoftBank Group, яка вже відзначилася створенням робота Pepper , Оголосила про придбання Boston Dynamics.
BigDog ( «великий пес»)
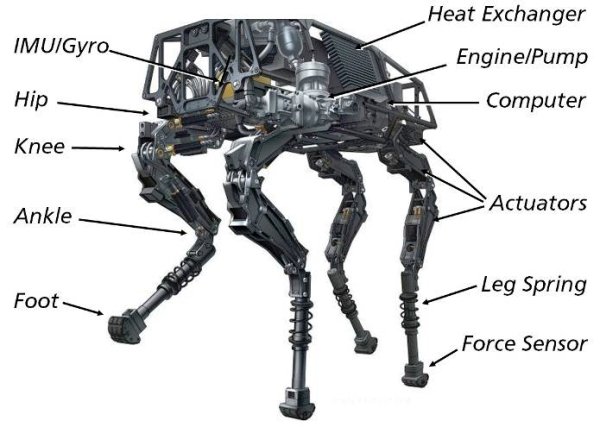
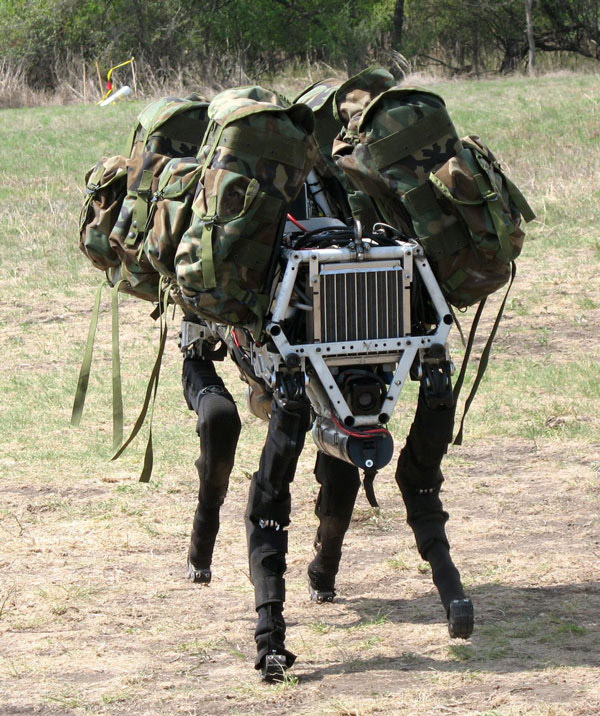
Найпершим роботом, який отримав широку популярність, став BigDog - чотириногий «мул» призначений для перевезення вантажів. Міністерству Оборони США потрібен був транспорт, здатний пересуватися по пересіченій місцевості і переносити важке спорядження. Перші моделі BigDog були створені в 2005 році і мали наступними технічними характеристиками: висота 0,76 м, довжина 0,91 м, вага 110 кг, стерпний вантаж до 155 кг, швидкість переміщення 5-7 км / год, можливість долати ухили до 35 °, а також здатність опускатися і вставати після падіння.
«Великий пес» являє собою складну автономну систему, що працює від двигуна внутрішнього згоряння потужністю 15 к.с., і керовану бортовим комп'ютером. Комп'ютер обробляє велику кількість сенсорів, які включають в себе датчики положення і зусилля в шарнірах, контакт із землею, навантаження на грунт, гіроскоп, лідар, комплекс відеокамер для створення об'ємного зображення навколишнього світу, датчики тиску, температури, витрати внутрішніх рідин і палива.
У 2009 році військові висунули вимоги по модернізації робота. Проект отримав назву Legged Squad Support System, проте, самі творці охрестили своє дітище AlphaDog. Вантажопідйомність збільшилася до 185 кг, а автономність ходу перевищила 30 км. І, мабуть, найважливішим нововведенням стала можливість робота приймати голосові команди оператора.

AlphaDog пройшов успішні випробування з морськими піхотинцями в 2015 році, проте, на озброєння прийнятий не був. Серед причин називали високу вартість, демаскирующий шум від двигуна і ймовірні проблеми для загону в разі поломки машини під час бойового завдання.
Загальна сума витрат на розробку і впровадження BigDog і AlphaDog перевищила 42 млн доларів. Фінансування в повному обсязі здійснювалося за рахунок Міністерства Оборони США.
Cheetah ( «гепард»)
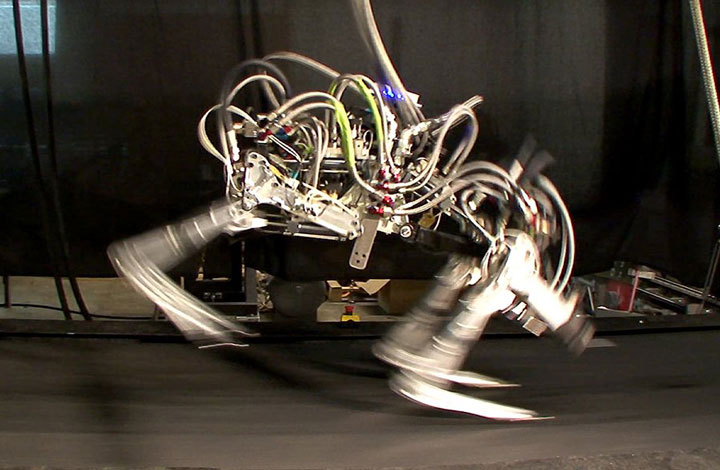
Наступну модель можна по праву вважати найшвидшим крокуючим роботом в світі. На випробувальному стенді Cheetah розігнався до швидкості 29 миль / год (понад 46 км / год) - жодна людина в світі не здатний бігти з такою швидкістю. Лише Усейн Болт на коротких відрізках своїх забігів досягав 44,7 км / год.
Конструкція спини робота повторює будову такої у живого гепарда - вона здатні згинатися вперед і назад, збільшуючи довжину кроку і швидкість руху. Що характерно, гроші на створення Cheetah були виділені DARPA за програмою Maximum Mobility and Manipulation. По суті, Cheetah є досвідченим зразком для відпрацювання технологій створення швидких шагоходи. Робот не здатний пересуватися поза стендом.
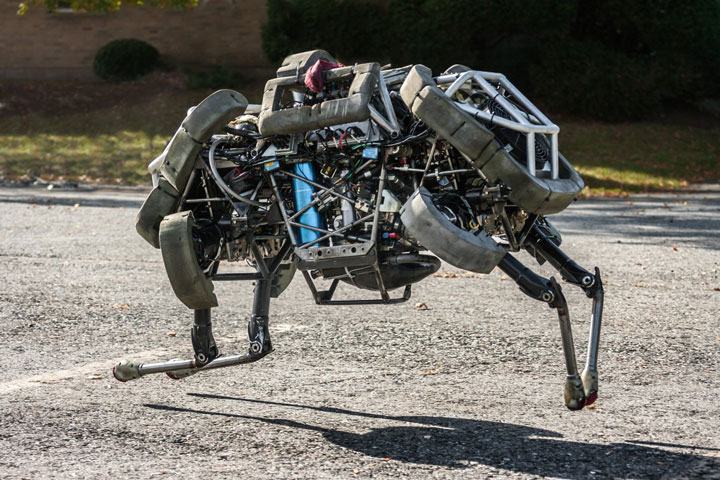
Розвитком цієї платформи став інший робот під назвою WildCat. Він теж може похвалитися рекордами швидкості - максимальне значення досягає 32 км / год, що дозволяє йому посісти перше місце серед автономних чотириногих машин. Робот має чималі розмірами - його висота становить 1,2 метра, а вага понад 150 кілограмів. «Серцем» механізму є ДВС, який приводить в дію насос гідравлічної системи.

З іншого боку «Дикий кіт» здатний вільно пересуватися в навколишньому світі, а не тільки на біговій доріжці.
Як справжній скакун, WildCat здатний йти кроком, а також бігти риссю або галопом. «Дикий кіт» вміє згинати спину при бігу, точно так же, як це роблять тварини.
Sand Flea ( «піщана блоха»)

Sand Flea являє собою компактну чотириколісну платформу. Вага машини становить близько 5,5 кілограм, а висота всього 15 см. Управління відбувається по радіосигналу або по внутрішній програмі.
Відмінною особливістю «Піщаної блохи» є можливість здійснювати стрибки на висоту до 30 футів (9-10 метрів), і тим самим долати більшість перешкод.
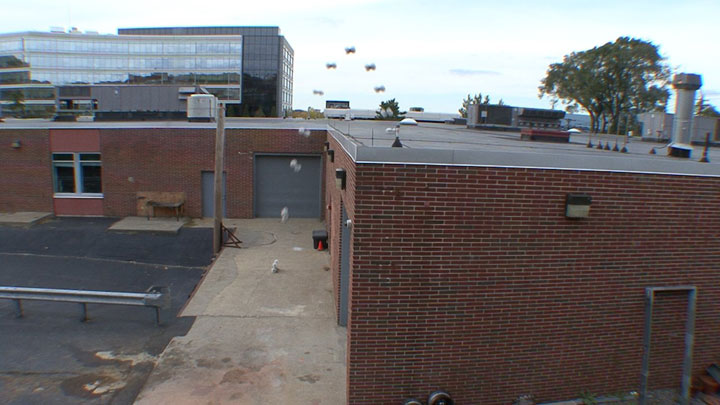
Запасу стисненого вуглекислого газу вистачає приблизно на 25 стрибків, а вбудована система стабілізації зберігає орієнтацію під час польоту. Кілька відеокамер забезпечують круговий огляд.
Фінансування проекту здійснюється армійської організацією Rapid Equipping Force (REF) і національною лабораторією Міністерства енергетики США Sandia National Laboratory. За задумом, Sand Flea і WildCat є «розвідниками», на відміну від «вантажника» BigDog.
Spot ( «цятку» - собача кличка в англомовних країнах)

Ще один чотирилапий робот під назвою Spot, як і його модифікації SpotMini і New SpotMini, є варіацією «собачої» серії. У порівнянні з BigDog машини позбулися двигуна внутрішнього згоряння і обзавелися електродвигуном з гідроприводом і акумулятором. Таке рішення негативно позначилося на автономності і вантажопідйомності, але дозволило значно знизити рівень шуму.
Spot вміє орієнтуватися всередині і зовні приміщення, а також користуватися сходами і долати невисокі перешкоди. Висота машини складає близько 1 метра, вага 75 кг. Максимальна величина корисного навантаження дорівнює 45 кг, крім того Spot здатний переносити вантаж вагою 23 кг протягом 45 хв на одному заряді батареї. Робот має хорошу стійкість і здатний встояти на ногах після стусанів і стусанів від своїх творців.

SpotMini - є зменшеною версією моделі Spot і, на думку інженерів Boston Dynamics, призначений для офісу або будинку. Він важить 25 кг (30 кг з рукою - маніпулятором).

SpotMini може працювати близько 90 хвилин від вбудованого акумулятора в залежності від яку переносять навантаження, яка «за паспортом» становить 14 кг. При цьому SpotMini це самий тихий робот, створений компанією.
Рука-маніпулятор у SpotMini має п'ять ступенів свободи і здатна збирати і переносити різні предмети. Комплект датчиків, що забезпечують коректну роботу маніпулятора, включає в себе стереокамери, датчики глибини, IMU-сенсори і датчики положення і зусилля в кінцівках.
Atlas ( «Атлант, Титан»)

Без сумніву, найбільший інтерес для звичайної людини являє антропоморфний робот на ім'я Atlas. Фахівці Boston Dynamics заявляють, що «Атлант» є найдосконалішою моделлю в лінійці сучасних людиноподібних роботів. Його зріст становить 1,5 метра, вага 75 кг, в його конструкції використовується 28 шарніров- «суглобів», що в два рази більше, ніж у «котячих» і «собачих» серій. Робот здатний переносити в руках вагу близько 10-11 кг.
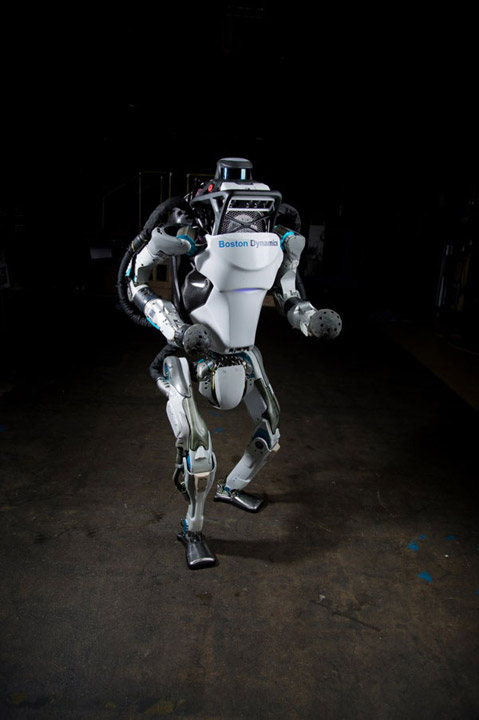
Система управління Atlas координує руху рук, тулуба і ніг для забезпечення контролю над всім тілом, що дозволяє йому працювати в великому радіусі дії, займаючи лише невелику площу. Стереозрения, далекоміри, гіроскопи і інші сенсори дають Atlas можливість маніпулювати об'єктами в навколишньому середовищі і подорожувати по пересіченій місцевості. «Атлант» зберігає рівновагу, коли несе вантаж або отримує удар і може встати, якщо впаде.
У майбутньому розробники розглядають варіант додати роботу комунікаційні здібності. Atlas може навчиться говорити і розрізнити людей по обличчях і голосам. Що характерно, засновник Boston Dynamics Марк Райберт не є прихильником масового застосування людиноподібних роботів. Він вважає, що робити робота схожим на людину варто тільки при доцільності такої дії. Наприклад, як у випадку з моделлю PETMAN, яка була розроблена в Boston Dynamics для тестування костюмів хімічного захисту та армійської спецодягу.
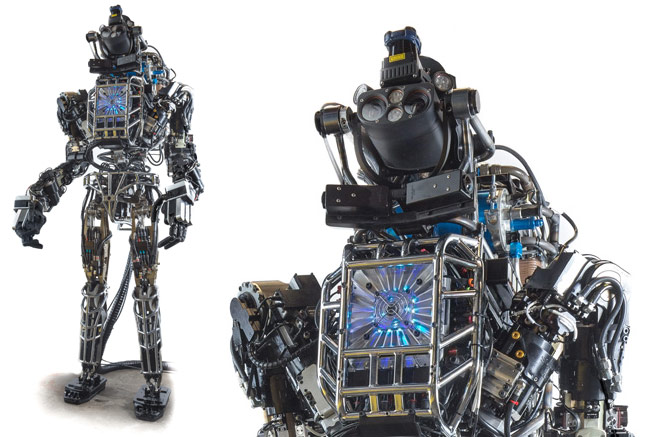
Перший прототип робота Atlas
PETMAN імітує фізіологію людини, контролює температуру, вологість і потовиділення всередині одягу, щоб забезпечити реалістичні умови випробувань. Робот оснащений вбудованими датчиками, які виявляють будь-які хімічні речовини, що протікають через костюм.
Розробки ведуться в рамках програми хімічного і біологічного захисту (Chemical and Biological Defense Program - CBDP) департаменту захисту Міноборони США (Department of Defense - DoD).
Handle ( «рукоять»)

Модель під назвою Handle поєднує в собі переваги наявності у робота «рук» і «ніг» зі швидкістю пересування і ефективністю коліс. Він використовує багато з тих же принципів динаміки, балансу і маніпуляцій предметами, які використовуються в чотириногих і двоногих роботів Boston Dynamics. У його конструкції застосовується тільки 10 шарнірів, що робить Handle менш складним, ніж інші моделі. Колеса дозволяють швидко їздити на плоских поверхнях, в той час як ноги можуть йти практично в будь-якому місці.

Висота Handle становить 2 метри, вага понад 100 кілограмів. Робот здатний переносити вантаж до 45 кілограм і перестрибувати високі об'єкти.
Гідравліка наводиться в дію електричним двигуном, який живиться від акумулятора. Модель здатна розгортатися на місці, присідати і вставати.
RHex

RHex або «робот-тарган», як його прозвали розробники, має компактні розміри і пересувається за допомогою шести незвичайних ніг. Висота моделі становить 14 сантиметрів, вага 12 кг, а управління здійснюється по радіосигналу. RHex здатний переносити до 2 кг корисного ваги, в якості якого можна встановити додаткове обладнання. Також робот обладнаний вбудованими відеокамерами в передній і задній частині корпусу, що робить його хорошим розвідником.

Герметичний корпус дозволяє «таргана» пересуватися у вологому середовищі, болотистій і брудною місцевості, в каналізаційних трубах. Завдяки будові ніг, модель з легкістю долає гірські породи, пісок, рослинність, залізничні колії, сходи та інші перешкоди.
Час автономної роботи складає чотири-п'ять годин. Робот був розроблений на замовлення DARPA і US Army Rapid Equipping Force (REF).
***
Ми розглянули основні моделі роботів від американської компанії Boston Dynamics. Сподіваємося, що колектив «Бостона», до слова складається з 80 співробітників, не зупинятиметься на досягнутому і продовжить впроваджувати роботів в критичні сфери нашого життя. Якщо не враховувати військову сферу, яка, до речі, і є основним спонсором розвитку роботехніки, то в майбутньому роботи зможуть надати велику допомогу людям в якості пожежних, рятувальників, космонавтів, особистих асистентів та інших людських помічників.